Refinement of the disparity maps
The purpose of this step is to refine the disparity identified in the previous step.
Optical_flow method
Warning
The optical flow method is still in an experimental phase. The parameter window_size in the matching cost parameters requires a value greater than 1 .
Inspired by [Lucas-Kanade]’s algorithm
We first need to suppose that pixel shifts are subpixel between left and right images.
Second, we need to suppose brightness constancy between left and right images. (2)
Now, we can write :
with hypothesis (2) :
after dividing by
:
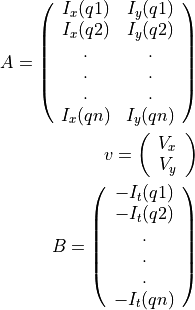
We can resolve v thanks to least squares method :
Lucas & Kanade works on a pixel and its neighbourhood so:


The following diagram presents the different steps implemented in Pandora2D to enable the refinement of the disparity map with optical flow.
An iterative image registration technique with an application to stereo vision. Proceedings of Imaging Understanding Workshop, pages 121–130.

Dichotomy method
- It’s an iterative process that will, at each iteration:
compute the halfway positions between each best candidate in the cost volume and its nearest neighbours.
compute the similarity coefficients at those positions using the given filter method.
find the new best candidate from those computed coefficients.
Available filters are described in Interpolation filters.
Note
Two dichotomy implementations are available in Pandora2D: one in C++ and one in Python. By default, the C++ dichotomy is used when using the “dichotomy” refinement method. To use the Python version, enter “dichotomy_python” as the refinement method in the configuration file.
Warning
To avoid aliasing, it is strongly recommended to set the subpix parameter of the Matching cost computation step to a value greater than 1 when using dichotomy.
Configuration and parameters
Parameters :
Name |
Description |
Type |
Default value |
Available value |
Required |
|---|---|---|---|---|---|
refinement_method |
Refinement method |
string |
None |
“optical_flow” |
Yes |
iterations |
Number of iterations |
int |
4 |
>0 |
No |
Configuration example with optical_flow :
{
"input" :
{
// input content
},
"pipeline" :
{
// ...
"refinement":
{
"refinement_method": "optical_flow",
"iterations" : 7
}
// ...
},
"output":
{
// ...
}
}
Parameters :
Name |
Description |
Type |
Default value |
Available value |
Required |
|---|---|---|---|---|---|
refinement_method |
Refinement method |
string |
None |
“dichotomy”, “dichotomy_python” |
Yes |
iterations |
Number of iterations |
int |
None |
1 to 9
if above, will be bound to 9
|
Yes |
filter |
Configuration of the filter
used for interpolation
|
dict with key:
- “method”
|
None |
{“method”: “bicubic”} |
Yes |
Configuration example with dichotomy c++ :
{
"input" :
{
// input content
},
"pipeline" :
{
// ...
"refinement":
{
"refinement_method": "dichotomy",
"filter": {"method": "bicubic"},
"iterations" : 7
}
// ...
},
"output":
{
// ...
}
}
Configuration example with dichotomy python :
{
"input" :
{
// input content
},
"pipeline" :
{
// ...
"refinement":
{
"refinement_method": "dichotomy_python",
"filter": {"method": "bicubic_python"},
"iterations" : 7
}
// ...
}
}
Parameters :
Name |
Description |
Type |
Default value |
Available value |
Required |
|---|---|---|---|---|---|
refinement_method |
Refinement method |
string |
None |
“dichotomy”, “dichotomy_python” |
Yes |
iterations |
Number of iterations |
int |
None |
1 to 9
if above, will be bound to 9
|
Yes |
filter |
Configuration of the filter
used for interpolation
|
dict with keys:
- “method”
- “size”
|
None |
{
“method”: “sinc”,
“size” : 6 to 21,
}
|
Yes |
Configuration example with dichotomy c++ :
{
"input" :
{
// input content
},
"pipeline" :
{
// ...
"refinement":
{
"refinement_method": "dichotomy",
"filter": {
"method": "sinc",
"size": 9
},
"iterations" : 7
}
// ...
},
"output":
{
// ...
}
}
Configuration example with dichotomy python :
{
"input" :
{
// input content
},
"pipeline" :
{
// ...
"refinement":
{
"refinement_method": "dichotomy_python",
"filter": {
"method": "sinc_python",
"size": 9
},
"iterations" : 7
}
// ...
}
}